
REDtoolbox
GNSS PPK Postprocessing and Geotagging
Elevate your aerial mapping projects with REDtoolbox,
the perfect GNSS PPK postprocessing solution when RTK is unavailable. Receive centimetre accurate image coordinates and use the output directly in you photogrammetry software.
We from developer team, we are committed to evolving our software to make your work simpler and more productive. Therefore, REDtoolbox excels in processing of datasets in any scale. From small missions to multi-flight projects you can achieve centimeter-level accuracy across thousands of images, greatly improving your photogrammetry and documentation efforts.
Our latest features include an auto-search function and enhanced merge capabilities, designed to help you effortlessly manage expansive projects across multiple flights. We’ve also optimized geoid handling and base station management to provide you with unmatched processing accuracy.
Key features
- Compatible to almost any RTK and PPK drone and REDcatch hardware.
- Handles RGB and Multispectral data
- PPK of multiple flights in one single run
- A folder crawler to get your files sorted for PPK
- Native photogrammetry software outputs
- update EXIF information, output *.txt files
- Merge RINEX hourly files
- Workflow to shift lat/lon/elev (already) RTK coordinates in *.jpg files
- Geoid support
- CLI interface for integrating and automatisation
from € 69,- excl. VAT
for perpetual license
LATEST Update: With release of REDtoolbox v3.3.3. on June 22th, 2025 we confirm that
DJI(c) MATRICE 4 RTK Enterprise (RGB and Multispectral) and the D-RTK3 base station are fully supported for PPK processing.
Who is using REDtoolbox and what is the software good for?
The software conducts post-processing PPK for a Base-Rover setup. This setup is commonly utilized in various UAV/drone applications as well as terrestrial devices. It generates a PPK corrected GNSS path at centimetre-level accuracy. The drone’s captured images are then accurately mapped to this PPK path, with respect to leverarm of the drone. Outputted in variouse formats like EXIF, *.txt and native software files, these results can be directly used into photogrammetry software such as Metashape, Pix4D, RealityCapture, ODM, Terra and other applications.
Back in 2014, at the beginning of RTK drones and direct georeferencing, REDcatch released it’s first version of REDtoolbox. Since then, this nice tool is used by hundreds of happy users worldwide. Customers in mining, surveying, infrastructure, archaeology and many more business share success.
Ongoing development and new features are warmly welcome by the drone community trusted by users globally.
Compatible drones and devices of REDtoolbox software

- DJITM Matrice 4 Enterprise, Multispectral RTK
- DJITM MAVIC 3 Enterprise, Multispectral RTK
- DJITM L2 (RGB camera)
- DJITM P4RTK Phanton4 RTK
- DJITM M300 P1 camera, L1 (RGB camera)
- AutelTM EVO2 RTK
- YuneekTM H520, H850 RTK
- EmlidTM Reach kits
- SepentrioTM mosaik drone kits
- ubloxTM ZED F9P, M8P chips
- ubloxTM kits like: TopoDrone, Teokit, metta, etc
- 3D ImageVector - camera GNSS & IMU
- 360RTK add-on for Insta360 one x2/x3/x4
Use the output directly in your photogrammetry software
Outputted as plain Text, as image EXIF data or in native Agisoft Metashape Professional, Pix4d Mapper, Pix4d Matic, Shape file and Google Earth kml, these information can be used directly witouht any additional converting.
Applications., eg. in photogrammetry and documentation.

- Agisoft Metashape Professional
- Pix4D Mapper / Pix4d Matic
- Reality Capture
- 3D Survey
- DJI Terra
- 3D Zephyr
- any, able to read txt or EXIF data
(R), TM ….All listed company and product names like DJI, Phantom, Autel, Emlid, Yuneec, ublox, etc. are registered trademarks.
REDtoolbox Tutorials
PPK and Geotagging Highlights

Watch this video, to get an idea how to use REDtoolbox for your daily work and where it can help you
- The automatic folder crawler to automatically select your files
- select your export favourites, such as EXIF, txt, Metashape *.psx, Pix4d *.p4d, PDF Reports, etc
- Run and analyse
Bulk shift (xyz) EXIF lat/lon/elev coordinates


Already have RTK data but you discovered discrepancies compared to your GCPs in lat/lon maybe due to missing NTV2 local transformation? Or in elevation/height due to non accurate geoid information?
REDtoolbox helps you to:
- by shifting lat/lon/elev coordinates, extracted from drones original EXIF images information
- enter the bulk shift in meters
- re-writes this positions into EXIF again so all other data like XYZaccuracy and roll/pitch/yaw remain
Multi flight processing

Learn how to use the “automatic search folder” option to process multiple flights in multiple subfolders in one single rund. This will speed up your PPK processing and provide better results
How to use with DJI(c) Terra

We created a video tutorial for the growing users of DJI terra software. As DJI terra does not allow an import of modified EXIF data directly. So please, follow the simple steps and you will enjoy REDtoolbox PPK accuracy in Terra.
Apply GEOID information

Apply *.tif geoid (WGS84 projection!) heights while PPK processing or on already geotagged RTK photos
Merge RINEX files

No matter what version of RINEX files you have. Outdated 2.x or 3.x, Hatanaka compressed or basic RNX, we can all merge them and update them to latest version.
- Merge hourly base station file to a single files for easier handling
- This feature is integrated in the “multiple flight processing” too
Watch the video tutorial to see how easy and powerful the RINEX merge tool of REDtoolbox is.
CLI Command Line Interface
Unlock the full potential of your geospatial data with REDtoolbox’s Command Line Interface (CLI)! Designed for the power user, the CLI opens up automated processing capabilities, allowing you to batch process large datasets with ease. Enjoy the flexibility of integrating REDtoolbox into your existing workflows and the efficiency of running complex operations with simple commands. Whether you’re streamlining data analysis or scaling up your projects, the CLI is your gateway to a more productive and automated geospatial future. Perfect for professionals looking to maximize efficiency and accuracy in their work
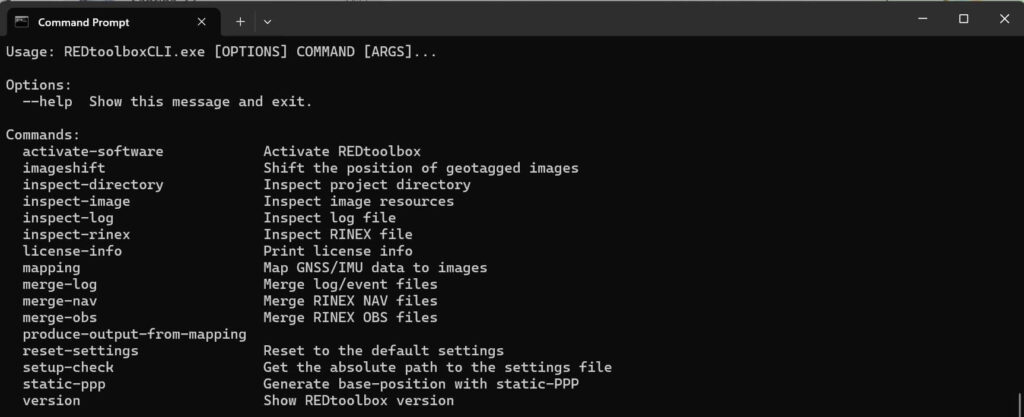
How to use? Navigate to the installation directory of REDtoolbox, enter the ../resources/assets/REDtoolboxCLI/ folder on your PC and start by typing REDtoolboxCLI.exe –help
Our promises
- We help you!
- Providing professional support
- Get the most out of your gps data
Get rid of using many many GCPs
For those looking to fully integrate REDtoolbox into their workflows, we offer personalized online training sessions. Our expert trainers are ready to tailor each session to your specific needs, ensuring you maximize the capabilities of REDtoolbox in your projects. Whether you’re new to aerial surveying or looking to enhance your existing skills, our training provides the insights and guidance necessary to optimize your use of the software. Take advantage of our customized training to unlock the full potential of REDtoolbox in your professional environment.
Download & free trial
Submit your email to download REDtoolbox software
Buy REDtoolbox software
Online purchase and product fulfillment are through FastSpring, a trusted online portal.
License only
Euro 69,- /net
- 1 seat perpetual license
- NO Updates! Limited to actual software version
- unlimited number of images process able, no limitations in output
- no subscription, no account needed
License + 1 year updates
Euro 99,- /net
- 1 seat perpetual license
- 1 year updates included
- unlimited number of images process able, no limitations in output
- download and activate the latest versions in the first year after purchase
- regular email support for REDtoolbox handling questions
+ Lifetime updates + Support
Euro 199,- /net
- 1 seat perpetual license
- lifetime updates for free (as long as software exists)
- unlimited number of images process able, no limitations in output
- lifetime updates to the latest software version
- priority email and phone support for REDtoolbox handling questions
- 1.5 hours of Support included
For existing customers: Update rates to current version and lifetime update
FAQs - Please read
We offer a 50% discount to teachers and students using REDtoolbox for education purposes. To obtain a discount coupon, please contact us using your verified email address from an educational institution. https://redcatch.freshdesk.com/support/tickets/new
PPK (Post-Processed Kinematics) and RTK (Real-Time Kinematics) are methods to enhance GPS accuracy. Consider PPK over RTK for remote areas without cellular coverage, extended flight missions, and projects needing high data integrity. PPK offers improved accuracy and flexibility without the need for real-time communication or additional hardware. It’s suitable for critical applications and achieves high accuracy levels through post-processing techniques. Choose PPK when real-time corrections aren’t possible, or when the highest accuracy and data integrity are crucial.
In some cases no, in other yes:
With PPK, GNSS RINEX data is logged onboard the device (such as a drone) during the data collection process. After the flight or data collection is completed, the logged RINEX data is post-processed using REDtoolbox software, along with data from reference stations (base stations). This post-processing step corrects errors in the GNSS data and enhances its accuracy.
Therefore, while PPK does not require a base station during data collection, it does require access to accurate reference data (RINEX data) for post-processing. This reference data can come from various sources, including CORS networks, GNSS rovers, GNSS base stations, or virtual reference stations (VRS). The availability and accessibility of reference data may vary depending on the location and specific requirements of the project.
Yes. REDtoolbox uses the latest PPK algorithms and supports multiconstellation GPS, GLONASS, Beidou, Galileo in multiband L1, L2, L5
After PPK of the flight path, it automatically assigns a highly accurate Trigger mapping onto this path.
Furthermore, you can PPK processing of multiple flights (folders) in a single run
There are several tutorials and we provide some amount of support for free.
However, to fully harness the capabilities of REDtoolbox PPK software, users are encouraged to participate in dedicated training sessions. These classes offer comprehensive instruction on utilizing REDtoolbox PPK effectively, covering essential topics such as data collection techniques, post-processing methodologies, and Photogrammetry software functionalities specific to REDtoolbox. Through hands-on training, participants gain practical experience navigating the software’s interface, interpreting results, and troubleshooting potential issues. Furthermore, these sessions provide insights into optimizing data accuracy and leveraging REDtoolbox PPK’s features across diverse applications in fields such as drone mapping, surveying, and geospatial analysis. By investing in training tailored to REDtoolbox PPK software, users can enhance their proficiency and confidence in utilizing this powerful tool to its fullest potential, resulting in more accurate and reliable geospatial data outputs for their projects.
No.
REDtoolbox works in GNSS native coordinate system WGS84 using elliptical heights.
Geoids are implemented for vertical correction, but not horizontal coordinate transformation parameters from as most of the nation wide EPSG library coordinate systems definitions are not accurate enough for surveying. See epsg.io to get an idea if your coordinate system is accurate or not. Like epsg 31255 with 0.5m accuracy only.
YES.
File like *.24o are the observations files including the signal raw measurements for each GNSS satellite.
The *.24n / *.24g *.24p files are the navigation files, including the ephemerides data of the satellites.
if files are named *24p you are lucky: This files are related to RINEX 3.x and contain information on GPS, GLONASS, Beidou and Galileo satellites. If you have multiple files, like 24n, 24g, 24l, 24e you are using an outdated RINEX 2.x format which should be avoided. REDtoolbox can handle it, but it is not recommended.
No.
REDtoolbox can not create virtualRINEX base stations based on RINEX data from two different physical locations from the same time span.